第29届IEEE机械电子与机器视觉应用国际会议(The IEEE 29th International Conference on Mechatronics and Machine Vision in Practice, M2VIP 2023)于11月21日-24日在新西兰皇后镇召开。本次会议由奥克兰大学、利兹大学和梅西大学联合主办,旨在为机电一体化和机器视觉提供一个跨学科的国际论坛,会议主题涵盖了机器人、智能传感器、人工智能、机器视觉和医疗康复机电系统等方面的科技前沿。M2VIP国际会议已成功举办29届,在人工智能、机械电子、机器视觉和机器人等领域具有很高的影响力,论文被IEEE Xplore、EI Compendex等检索机构收录。
本届会议设立最佳会议论文奖(Best Conference Paper Award),会议组委会根据文章水平和会议报告质量评选最佳会议论文并授予证书。
威尼斯9499登录入口威尼斯9499登录入口智能协作机器人科研团队的论文“Design and Research of a Manipulator with Variable Stiffness and Multi-directional Gripping”荣获最佳论文奖,第一作者为硕士研究生万仁宇,指导老师有朱姿娜、陈赛旋等。

【论文简介】
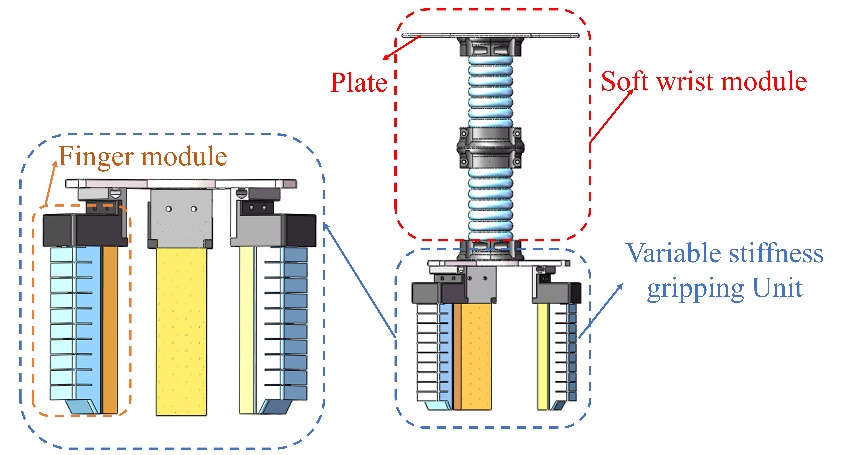
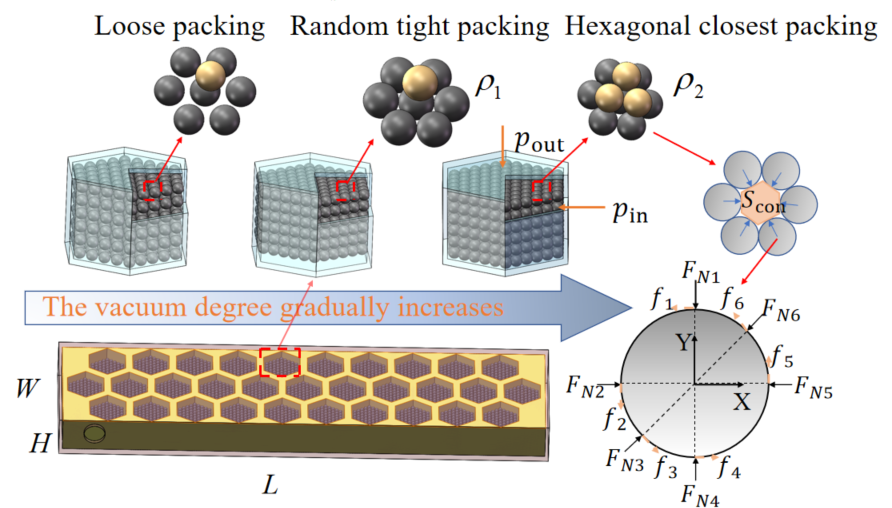
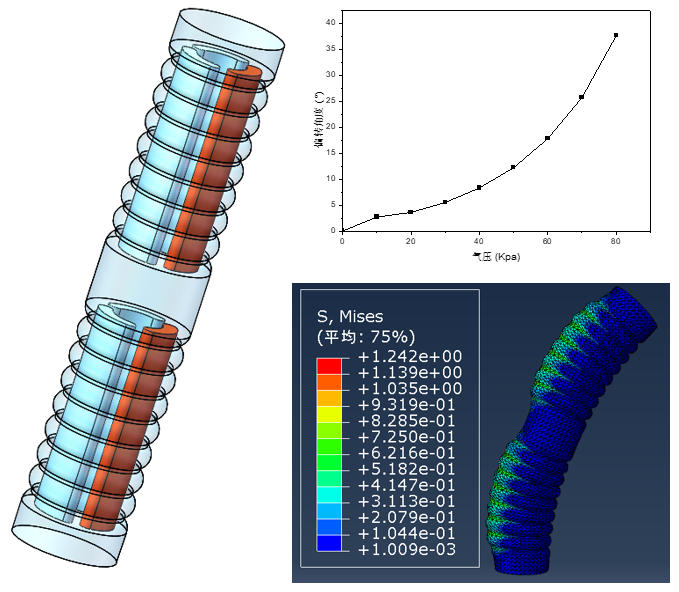
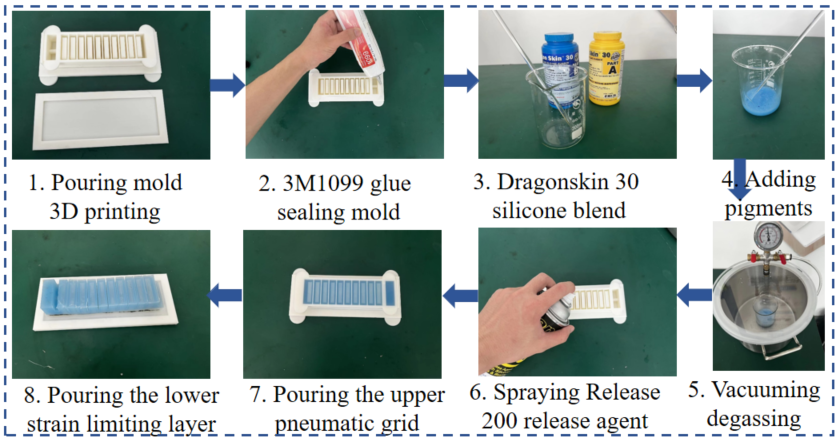
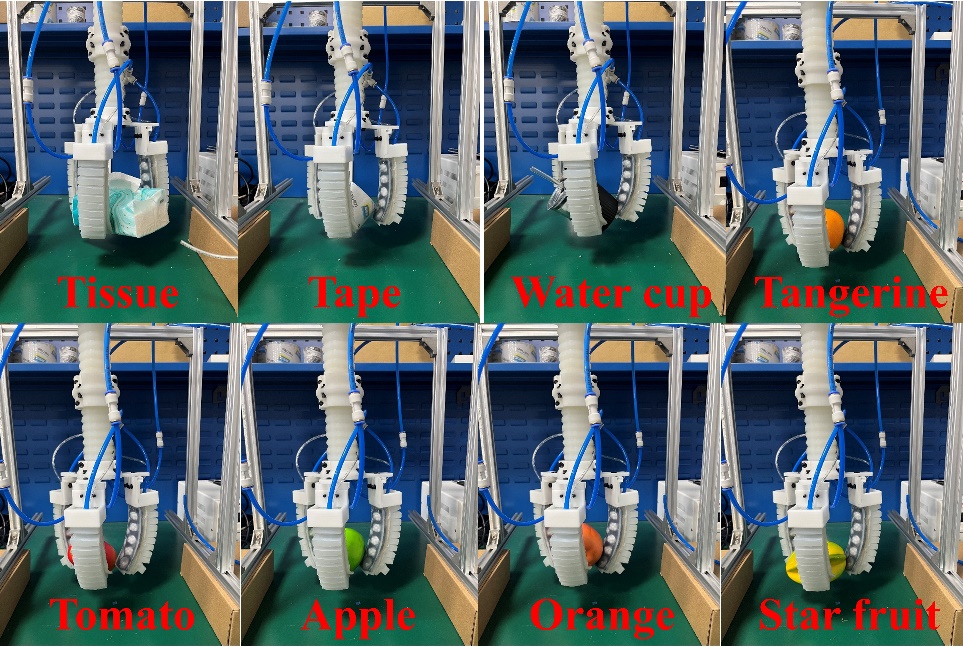
相比刚性抓手,软体抓手更加灵活、安全、适应性强,在医疗、服务、食品等领域具有广阔的应用前景。该论文提出了一种新型颗粒阻塞变刚度结构,通过蜂巢状网格支撑结构将阻塞颗粒分割成若干个区域,有效地减少了手指弯曲过程中颗粒重组造成的形状不稳定。该抓手不仅能够实现抓手柔性接触、刚性抓取,而且采用两段类似手臂功能的柔性腕,实现了在空间内多向抓取能力。实验表明,该抓手能够抓取形状和质量各异的目标物体,在阻塞气压为-50KPa的条件下,阻塞状态下的刚度能达到自然状态下刚度的9.8倍;在驱动气压30KPa和阻塞气压-30KPa的条件下,抓手的抓取质量可达315g,表明了该抓手能够实现较好的变刚度的能力并满足对日常果蔬、食品的抓取需求。